




https://intervesp.by/catalog/oborudovanie-dlya-proizvodstva-mebeli/frezerno-gravirovalnye-stanki-s-chpu/kuka-robot-kr210-s-frezernym-shpindelem-dlya-obrabotki-3d-modelej
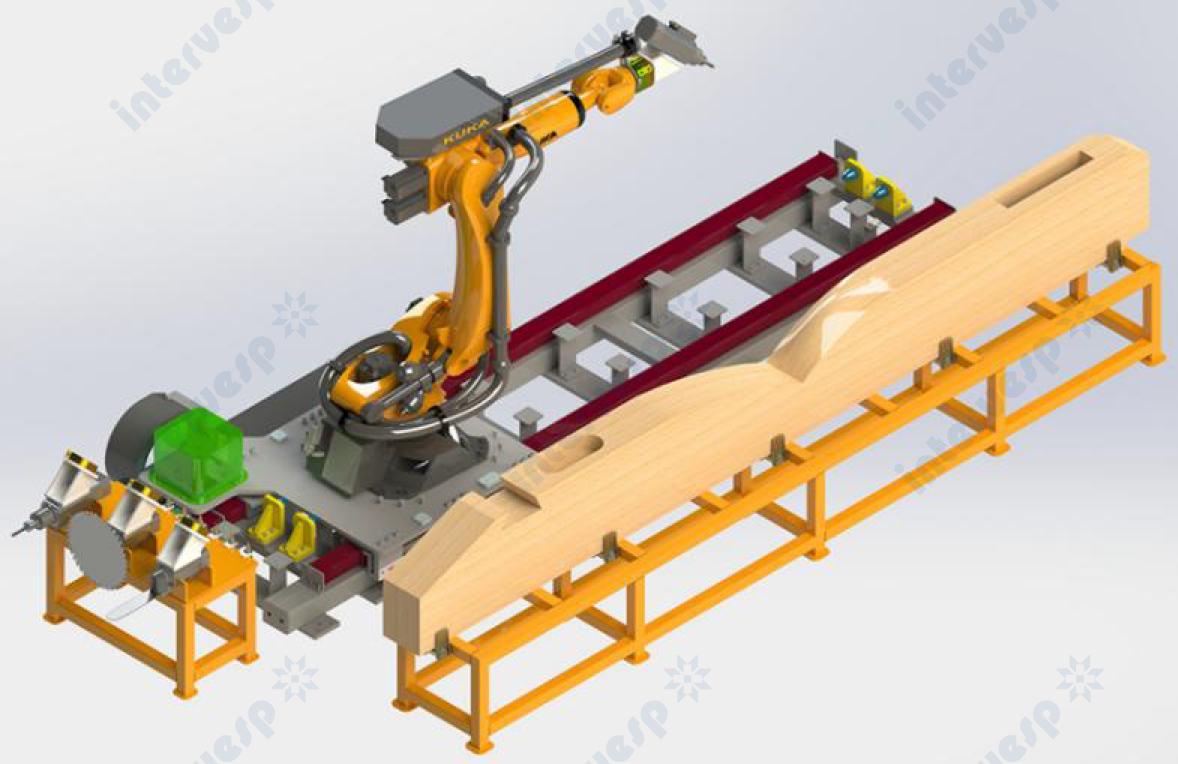
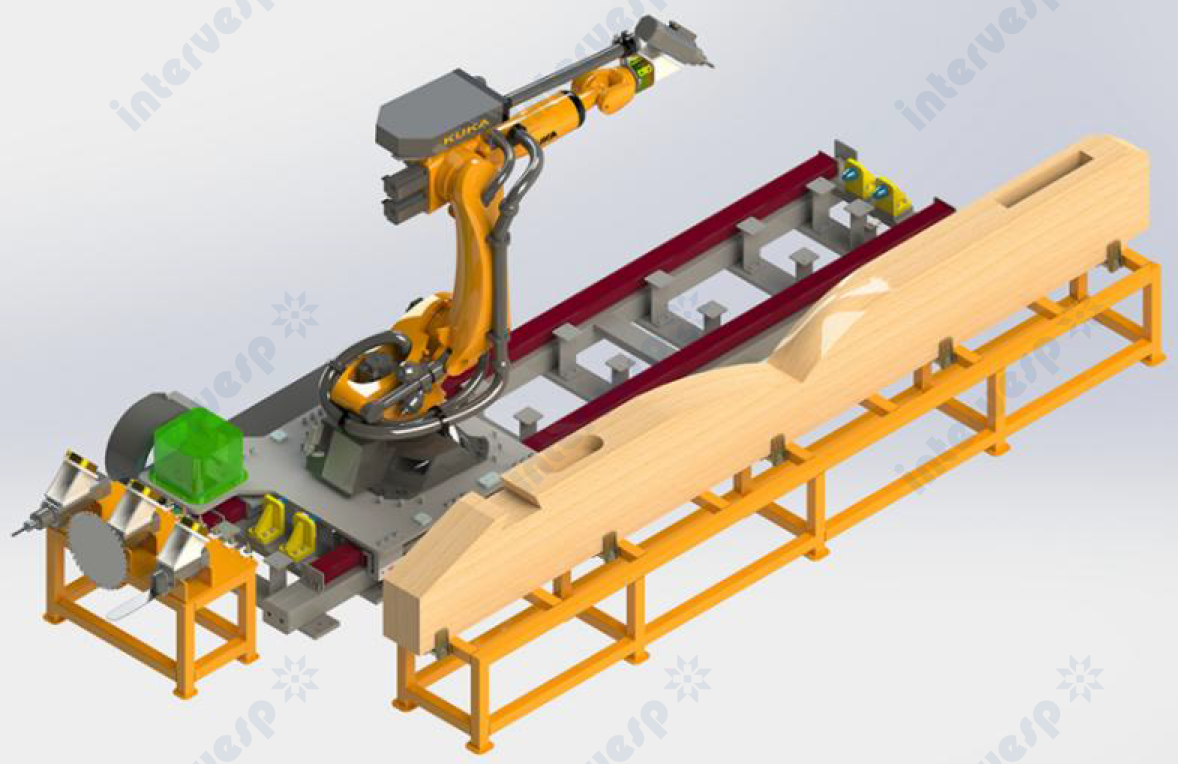
Kuka Robot KR210 с фрезерным шпинделем для обработки 3D моделей



 Китай
Китай Основные характеристики
Фрезерный шпиндель, кВт: 9 (HQD, Китай)
Повторяемая точность, мм: ±0,06
Преимущества
- 6 осей в базовой комплектации
- Опционально 7 и 8 ось


Шеф-монтаж и пуско-наладка
Осуществляем запуск поставленного оборудования

Сервис
Собственный штат наладчиков

Гарантия
Выезд специалистов во время гарантийного периода

Лизинг
Приобретение оборудования в лизинг на выгодных условиях
Получить предложение
 WhatsApp
WhatsApp  Telegram
Telegram KR 210 6-осевой универсальный, промышленный робот с большой рабочей зоной от Kuka способный обеспечить максимальную качество и гибкость производственного процесса.
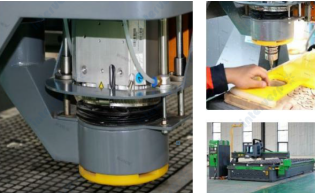
Фрезерный робот управляется промышленным роботом-манипулятором и электрическим фрезерным шпинделем. Электрический шпиндель в механической руке может обрабатываться под любым углом в рамках объема работ, а также автономное программное обеспечение для автоматического программирования нескольких шпинделей, используемое для управления работой механической руки (код робота), программное обеспечение может реализовать автоматизацию сложных 3D моделей обработки скульптур. Рука робота в базовой комплектации имеет шесть осей вращения. Если у вас есть необходимость, вы можете добавить другую ось, например, систему поворотного рабочего стола или подвижный робот (можно установить робота на рельсовые направляющие, подходит для обработки больших деталей).
Рабочий процесс робота:
1: С помощью программного обеспечения для трехмерного моделирования (например, ZBRUSH, FF, 3D Max, Rhino, Maya и т. д.) Покупатель изготавливает 3D-модель продукта, или путем 3D-сканирования и последующего экспорта образца в 3D-данные.
2: С помощью программного обеспечения для автоматического программирования нескольких шпинделей, переданного в 3D-данные (STL), создайте путь инструмента обработки, рассчитайте код обработки (G-код).
3: Автономное программное обеспечение будет обрабатывать траекторию фрезы по 3-8 осям, по траектории движения робота.
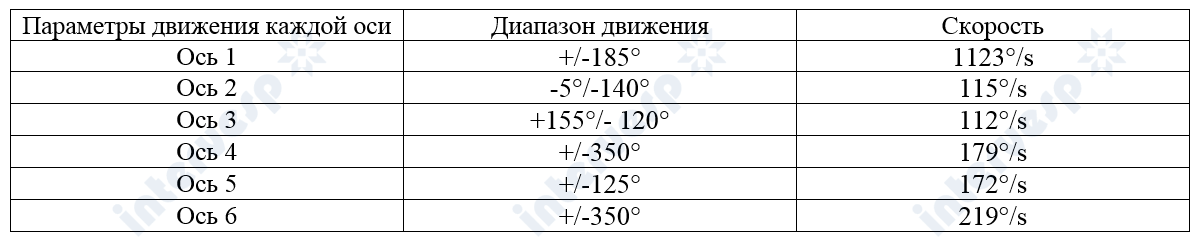
Параметры перемещения руки.
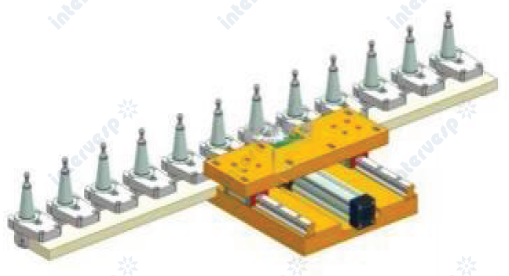
Дополнительная ось - перемещение по рельсовым направляющим.

Шкаф управления KUKA.

Робот-рука (6 осей).

Сервопривода KUKA.

Балансирный цилиндр.

Фрезерный шпиндель.

Инвертер.

Пульт KUKA.
Дополнительные опции

Поворотный стол (7-ая ось).

3D сканер.
Магазин инструмента.

Направляющие рельсы 12м.
Технические характеристики
Основные характеристики
| Фрезерный шпиндель, кВт | 9 (HQD, Китай) |
| Повторяемая точность, мм | ±0,06 |
| Нагрузка (относится к нагрузке точки P на переднем конце 6-й оси), кг | 210 |
| Дополнительная нагрузка, кг | 50 |
| Общая нагрузка, кг | 260 |
| Вес, кг | 1068 |
| Количество осей в базовой версии | 6 |
| Макс. вылет, мм | 2696 |
| Повторяемая точность, мм | ±0,06 |
| Фланец (по 6-й оси) | DIN ISO9409-1-A50 |
| Контроллер | KRC4 |
| Место установки | На пол |
Похожие товары
Китай 
Фрезерный станок с ЧПУ HCM 1325AVT
Рабочая зона (X*Y), мм: 1300х2500
Высота координаты Z, мм: 180
Шпиндель, кВт: 5,5
Инвертор, кВт: 5,5
Преимущества
Китай 
Фрезерный станок с ЧПУ HCM 2030 AVT
Рабочая зона (X*Y): 2100х3000 мм
Высота координаты Z: 230 мм
Шпиндель: 7,5 кВт
Охлаждения шпинделя: Воздушное
Преимущества
 Италия
Италия 
Компактный обрабатывающий центр STARTECH CN K
Рабочий ход по осям X-Y-Z, мм: 915-610-176
Электрошпиндель Hiteco, кВт: 2,4 S6 при 300Гц
Преимущества
Китай 










Фрезерный станок с ЧПУ BCM2130C
Рабочая зона, мм: 2100x3000
Высота по оси Z, мм: 200
Вакуумный стол + Т-пазы: да (10 зон)
Мощность шпинделя, кВт: 9,0 (HSD, Италия)
Охлаждение шпинделя: воздушное
Смена инструмента: автоматическая
Система ЧПУ: Syntec 60WE (Тайвань)
Преимущества
- Промышленная система ЧПУ Syntec 60WE (Тайвань)
- Выдвижные упоры в столе для позиционирования детали
- Электрошпиндель с воздушным охлаждение HSD 9,0кВт (Италия)
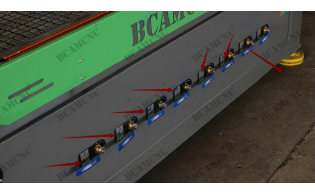
- Автоматическая смена инструмента с магазином на 8 позиций
Китай 





Фрезерный станок с ЧПУ BCM2130CE
Рабочая зона, мм: 2100x3000
Высота по оси Z, мм: 200
Вакуумный стол + Т-пазы: да (10 зон)
Мощность шпинделя, кВт: 9,0 (HQD, Китай)
Охлаждение шпинделя: воздушное
Смена инструмента: автоматическая
Система ЧПУ: Weihong NK105 G3 DSP
Преимущества
- Автоматическая смена инструмента с магазином на 8 позиций
- Электрошпиндель с воздушным охлаждение HQD 9,0кВт (Китай)
Китай 
Фрезерный станок с ЧПУ BCM1325S
Рабочая зона, мм: 1300x2500
Высота по оси Z, мм: 200
Вакуумный стол + Т-пазы: да (10 зон)
Мощность шпинделя, кВт: 9 (ATC)
Охлаждение шпинделя: воздушное
Смена инструмента: полуавтоматическая
Система ЧПУ: Richauto A11
Преимущества
- Полуавтоматическая смена инструмента
- Мощный электрошпиндель с воздушным охлаждением
Китай 
Фрезерный станок с ЧПУ BCM2130S (с полуавтоматической сменой инструмента)
Рабочая зона станка, мм: 2100x3000x200
Электрошпиндель с воздушным охлаждением, кВт: 9 (ATC)
Система ЧПУ: Контроллер Richauto A11
Преимущества
- Полуавтоматическая смена инструмента
- Мощный электрошпиндель с воздушным охлаждением
Китай 





Фрезерный станок с ЧПУ BCM2130D
Рабочая зона, мм: 2100x3000
Высота по оси Z, мм: 200
Вакуумный стол + Т-пазы: да (10 зон)
Мощность шпинделя, кВт: 9,0 (HSD, Италия)
Охлаждение шпинделя: воздушное
Смена инструмента: автоматическая
Система ЧПУ: Syntec
Преимущества
- Промышленная система ЧПУ Syntec (Тайвань)
- Выдвижные упоры в столе для позиционирования детали
- Электрошпиндель с воздушным охлаждение HSD 9,0кВт (Италия)
- Автоматическая смена инструмента с магазином на 10 позиций
- Сменой инструмента карусельного типа
Получить консультацию
Обратный звонок
Получить предложение
Заявка отправлена! Спасибо за Ваш запрос